Screen Space Fog of War
战争迷雾本身有着非常多的实现方案,类似Dota这样的MOBA游戏早在WC3中就有迷雾的效果实现。这里介绍一个基于屏幕空间战争迷雾的实现效果。


基于屏幕空间的战争迷雾,其核心是一张2D的ShadowMap,之后只需要在全屏Pass下,利用Depth+ClipSpacePosition来重建世界坐标,再从世界坐标转换到2D阴影贴图的局部坐标系下,即可得到当前像素的阴影值。
float depth = DepthTexture.Sample(positionNDC);
float3 positionWS = float4(float3(positionNDC, depth) * 2.0 - 1.0f, 1.0f);
positionWS = mul(_inverseVP, positionWS);
positionWS.xyz /= positionWS.w;

左图为Depth, 右图为重建出的WorldSpace Position。
因此基于屏幕空间的战争迷雾,最核心的就是计算得到的2D阴影贴图,以下列举的不同方案只是在计算这张阴影贴图的过程有所不同。
Grid
Introduction

网格方案在WC3时代就已经被广泛应用,将地图预计算为一张地图障碍物贴图,CPU根据玩家位置实时填充数据,以计算视野阴影贴图。最后转为GPU可读的RT作为2D Shadow。由于CPU填充能力较低,一般最后会辅以Blur来弥补画面缺陷。

左图为预计算的地图障碍物贴图,中间为当前帧可视范围。这里对象移动过的范围将会被标记为已探索,一般实际游戏会对这块区域做提亮操作,如图中白色部分表示为已知探索范围。
核心的CPU填充算法非常直观,本质就是借助队列实现的四邻域填充算法
queue.Enqueue(rootPixel);
while(queue.Count > 0) {
current = queue.Dequeue();
// if rootPixel could see current pixel
if(RayCast(current, rootPixel))
SetVisible(root);
// spread the visible area around root position in four direction
EnqueueAtPosition(root.x - 1, root.y, rootPixels, radius);
EnqueueAtPosition(root.x, root.y - 1, rootPixels, radius);
EnqueueAtPosition(root.x + 1, root.y, rootPixels, radius);
EnqueueAtPosition(root.x, root.y + 1, rootPixels, radius);
}
由于CPU在填充过程中需要等待,因此将数据更新另开线程,则阴影贴图的更新可以延迟于玩家移动,不影响主线程整体运行表现。

为了弥补多线程填充完成带来的突变感,存下当前迷雾帧以及上一帧的数据(Texture中R和B通道),在渲染时对其进行插值过渡,以避免突兀。
在WC3中,移动到一定距离才会触发迷雾的更新,和上述思路基本类似
网格方案较为流行也容易实现,但由于CPU填充能力有限,即便是能做到仅对脏区域局部更新,CPU仍然对高分辨率的需求无法得到较好的满足,且最后一般都需要提供较为高昂的Blur来模糊分辨率带来的界限。不过由于迷雾的特性,低分辨率有时反倒在边缘上能带来更好的过渡感。
Reference
Signed Distance Field Shadow
Introduction

SDF方案对CPU最为友好,几乎所有计算都可以在GPU中完成。若为静态场景可预bake场景成一张障碍物贴图,动态场景可使用正交投影相机在上方正交拍摄Depth再转换得到。之后使用SDF生成算法对这张障碍物贴图计算Min Signed Distance。最后对这张SDF进行RayMarching来得到一张2D阴影贴图。

从左至右依次为场景Map的障碍物信息,计算得到的SDF贴图,以及最终的2D阴影贴图。
本文选用JFA算法()来实时更新SDF贴图。其支持GPU并行,且复杂度仅为O(Nlogn)。要求是Texture的分辨率需要为2的幂次方。
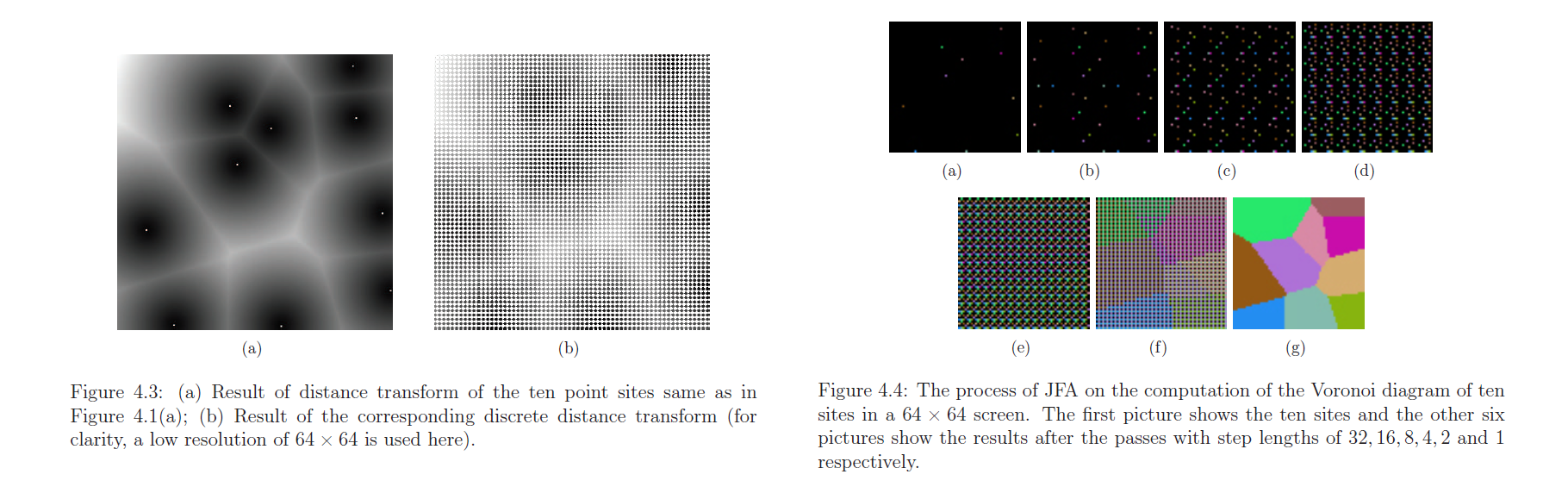
链接为作者描述JFA的Phd论文,也可以查看Jump Flooding in GPU with Applications to Voronoi Diagram and Distance Transform,但上面这篇在错误分析和变种应用上讲解的更为详尽。
SDF生成算法有较多种,可以参考中第五章中提供的几种经典算法来生成SDF贴图
JFA的具体思路就是,将复杂的待计算的格点p到3D表面或者2D形状边缘的距离,转化多Pass下,每个Pass中p找到八邻域3D/2D坐标于Seed的距离。其选择的八邻域到p的距离Step,将会不断除2直至为1(logN/2, logN/4, … 16, 8, 4, 2, 1)后得到最终的SDF Texture。
float power = Math.Log2(textureWidth);
for(int i = 0; i <= power; i++) {
int index0 = i % 2;
int index1 = (i + 1) % 2;
mat.SetFloat("_Power", power);
mat.SetFloat("_Level", i);
mat.SetTexture("_SDFTexture", pingpong[index0]);
Blit(mat, pingpong[index1]);
}
float stepwidth = _Power - _Level + 1;
for (int y = -1; y <= 1; ++y) {
for (int x = -1; x <= 1; ++x) {
// Sample semi-finished sdf texture
float2 uv = texCoord + float2(x, y) * _TexelSize * stepwidth;
float4 value = Sample(_SDFTexture, uv);
float2 seedCoord = value.zw;
float distance = length(texCoord - seedCoord);
if ((seedCoord.x != 0.0 || seedCoord.y != 0.0) && distance < minDistance) {
minDistance = distance;
minCoord = seedCoord;
}
}
}
JFA本身是存在一定error的,但作者在文章中对不同场景提出了几个算法上的变种(JFA2, 1+JFA…)用于减少Error。上述Phd论文中还分享了在Voronoi Diagram,Delaunay Triangulation, Direct Shadow等应用的原理
计算2D Shadow中的Sphere RayMarching本身很好理解,将SDF图中采样的值,也就是到边界的最近距离作为步进的最长距离(步进更大的距离将可能与已有边界碰撞)。
float drawShadow(float2 uv, float2 lightPos)
{
float2 direction = normalize(lightPos - uv);
float2 p = uv;
float distanceToLight = length(uv - lightPos);
float distance = 0.0f;
for(int i = 0; i < 32; i++) {
float s = Sample(_SDFTexture, p);
if(s <= 0.00001) return 0.0;
if(distance > distanceToLight) return 1.0;
distance += max(s * _StepScale, _StepMinValue);
p = uv + direction * distance;
}
return 0.0;
}
SDF本身是可以直接计算出半影的,但在边界上存在较为严重的BandingArtifact,各类文献报告中均有对此进行改善缓解,一般会选用混合方案来避免这样的问题。其中也有改进后的ConeTracing方法,在UE4以及中有过提及。

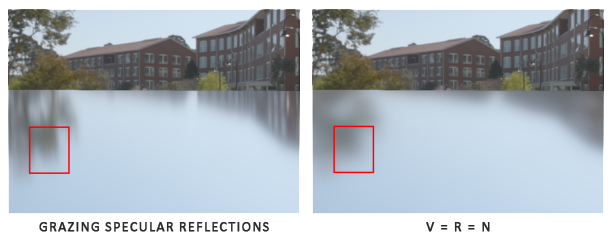
左图为SDF直接计算得到的半影,右图则为在边界上RayMarching带来的精度不够导致的BandingArtifact现象
演示中为了避免BandingArtifact,并没有直接算出半影而是算出二值图最后配合Blur,并按距离增大Blur半径来模拟半影的效果。

Reference
Jump Flooding in GPU with Applications to Voronoi Diagram and Distance Transform
Signed Distance Fields in Real-Time Rendering
Mesh Projetion
Introduction

2D阴影由于其特殊性,可以由CPU直接计算出一个变形后的Mesh作为平面的阴影区域。

这里需要对障碍物进行边缘编辑,以调整出适应形状的阴影区域
对场景中所有变形后的Mesh,多次的渲染到一张RT上,即可得到所需的2D Shadow Map(本方法在Demo中并未涵盖,可参考Asset Store的SFSS插件)
若是场景中物体较多,则计算阴影区域的CPU压力将会较大,且即便为静态场景可能也需要多次的DrawMesh才能得到最后的2D ShadowMap。但其优势是在Shader中较前两者,可以较好的控制半影区域的绘制,以得到高质量的阴影结果。

Reference
Summary
由于实现战争迷雾的方案较多,这里仅提供一个Unity上的基于屏幕空间战争迷雾的提供了上述Grid和SDF方案实现的项目Fog of War以供参考(Mesh Projetion的方案可以直接使用Unity SFSS的插件)
Demo中SDF可使用较高分辨率来完成实时预览一般给定128x128或者256x256皆可(过高分辨率需要更多次的Blur来带来半影的效果)。
而CPU的填充版本则由于C填充性能有限,因此建议给定64 x 64或32 x 32获得更平滑的效果。
Introduction
离线渲染中,对于面积光的渲染也有较多研究,多为在面积光源形状上做采样,配合BRDF进行MIS,但这在实时渲染中要想收敛则采样数过多开销过大。
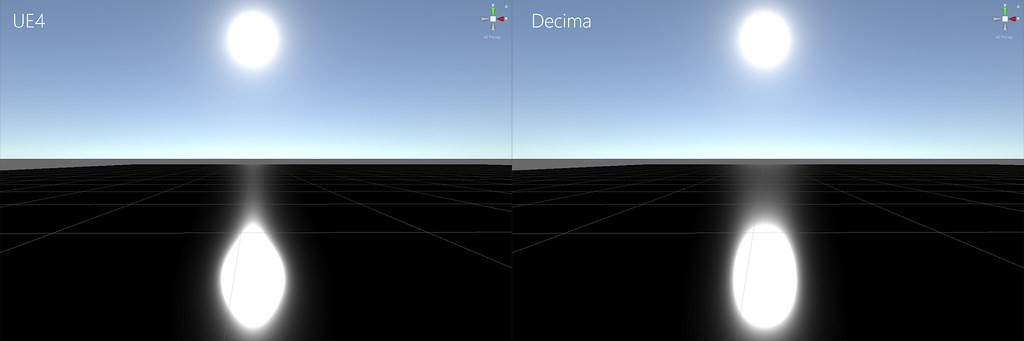
Eric Heitz曾对多边形的实时面积光渲染做出较好的模拟,对球面积光的近似多采用Karis在13年发布的Representative Point Method,其实现较为高效又兼容GGX微表面被广泛采纳。Decima在Siggraph 2017上又对其进行了改进,使其在边缘处拖尾更接近Reference(如图)。
但无论是UE4或是Decima都无法保证Physically Based,也就是不满足Energy Conservation,仅能实现较为近似的效果。因此这里不对Normalization Factor做过多记录。
Decima: We’re currently experimenting with alternative formulas for
normalization to better match our reference. This, however,is still in flux.
UnrealEngine: To derive an
approximate normalizationfor the
representative point operation we divide the new widened normalization factor by the original
Representative Point Method
Unreal Engine 4
Representative Point的核心思想就是使用一个点来模拟一个球面光的效果。在GGX BRDF计算中,光照方向不再固定,而是来自于球面,因此关键是如何确定光照方向。
// no more punctual light direction
float3 L = normalize(lightPoint - hitPoint);
// but get L from spherical area light
float3 L = getLightDirection(normalize(lightPoint - hitPoint), ...);
需要注意的是,此方法
对平行光同样有效(平行光本为点光无限远的近似),仅需将原始L改为平行光方向即可。
Karis提出的解决上述问题的核心思想是,当反射光向量R与球相交,则此时R就是光照方向向量。R处于球外时,若为离线渲染中,则此时应在球面上大量采样来求解对表面BRDF的贡献。由于为实时渲染,思路就是选取对表面光照贡献最大的点作为光照方向。此时选择球面上离反射向量R最近的点作为光照来源(如图)。
float3 getLightDirection(float3 L, float3 R, float radius)
{
float3 centerToRay = R * dot(L, R) - L;
// ray intersected / not intersected both combined(saturate)
float3 closestPoint = L + centerToRay * saturate(radius / length(centerToRay));
// the length of closestPoint could be used for normalization
return normalize(closestPoint);
}
上述UE4实现中,
已经包含了反射光与球相交/不想交的情况。因此仅需对GGX的光照来源进行改变即可快速模拟球面光。
UE4中的近似Normalization Factor选择如下,由于仅为近似解,因此PDF中也未包含详细推导
Decima
Decima的近似实现也沿用了UE4的方法,变化的是选取光照来源位置不再是反射光线最近的点,而是能使得最大的点(GGX高光分布中N与H越接近,或者说R与L越接近则起光照在BRDF上的贡献最大,可自行查看Disney BRDF Explorer中GGX的分布)。
Decima采取如下方式选取光照方向
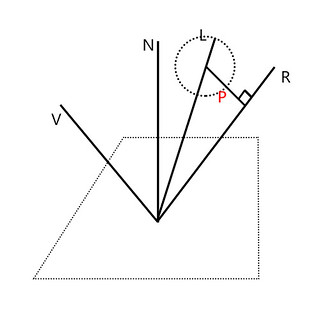
这里有一处微调,不再是向R投影,而是投影至Lc(如图)
取为一坐标系,在此圆盘上找到一个,使得达到最大的点。
由于可以万能表示, ,且在区间内单调递增,因此将求取转为求。且令(选此因为分式上含根号,且可直接将用于GGX的NDF计算上)
此处推导过于繁琐,因此未给出具体展开式
取
由于牛顿迭代可求函数根,对做多次迭代则可收敛至根值。此时要求最大值,因此对进行牛顿迭代,则根值处为求得最大值。取为最终结果。
float GetNoHSquared(float radiusTan, float NdotL, float NdotV, float VdotL)
{
// See presentation for more deatil
}
void EvaluateNdotH(float radius, float roughness, float lightCenterDistance, float NdotL,float NdotV, float LdotV, inout float NdotH)
{
float radiusTan = max(0.001, radius / lightCenterDistance - roughness * 0.25);
NdotH = sqrt(GetNoHSquared(radiusTan, NdotL, NdotV, LdotV));
}
void EvaluateNormalizationFactor(float roughness, float LdotH, float radius)
{
// Decima: Still in flux
float roughnessSquaredLdotH = roughness * roughness * (LdotH + 0.001);
normalization = roughnessSquaredLdotH / (roughnessSquaredLdotH + 0.25 * radius * (2.0 * roughness + radius));
}
这里使用时,需格外注意提供给GGX计算的,除更改后的NdotH外,NdotL, NdotV, VdotL, LdotH中的L与H皆为初始方向,尽管这样会在Point垂直于Normal时失效,但仍然能取得较好的效果
ScreenShots
下图为Unity 2018中实现对比结果,可明显看见接近边缘处的拖尾更接近Reference,也就可以实现地平线中夕阳的拖尾效果。
Reference
Introduction
本文基本理论及其实现参考GPU Gems 2和Scratchapixel
大气的效果主要是由大小的粒子经过大量散射后带来的结果。 其中光被分子大小的粒子散射称之为Rayleigh scattering,而更大一些的沙尘散射被称之为Mie scattering。 大气散射的结果主要是由这两部分组成。 本文未实现多重散射,以及点光源等更通用的方法,而是使用单级散射配合上平行光的结果。
Out-Scattering And In-Scattering
Out-Scattering
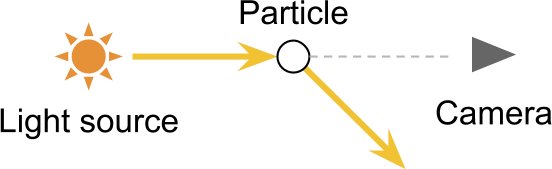
In-Scattering
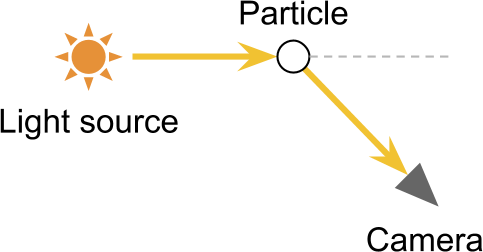
如若有一平行光(这里假定太阳无限远,则光源近似于平行光)入射大气相交C点,则由于Out-Scattering的影响光照强度将会有一定衰减,其中T为衰减系数。

从P点的光照抵达A点时,会发生由P点的大气粒子经过散射造成的In-Scattering,从方向变为方向,散射系数定义为S,为光的波长,为散射角度,为相对海拔高度。 同样也会由于在路径上造成衰减。
S表示的是在某一方向上的散射系数,以Rayleigh scattering为例
| Parameter | Meaning |
|---|---|
| 入射光波长 | |
| 散射角度 | |
| h | 当前点的海拔 |
| N | 分子数量密度 |
| 关于海拔1位置的相对密度 |
其中可以拆分为三项,就是体渲染中常见的Phase Function
无论是Mie还是Rayleigh其大气密度都随着海拔接近于指数下降
Rayleigh Scattering And Mie Scattering
这里可以通过对在整个球面上进行积分,以算出在总方向上的散射系数。 其中可以预计算完
大气中的吸收系数可以忽略不计,因此散射系数基本由Phase Function决定。 其对应的Phase Fucntion为
Mie Scattering不像Rayleigh那样,其大小变化也接近于从海拔1位置处指数下降,这里取,
Optical Depth
衰减指数T与海拔高度有关,非定值,因此需要在海拔上做积分
此处令光学深度D为
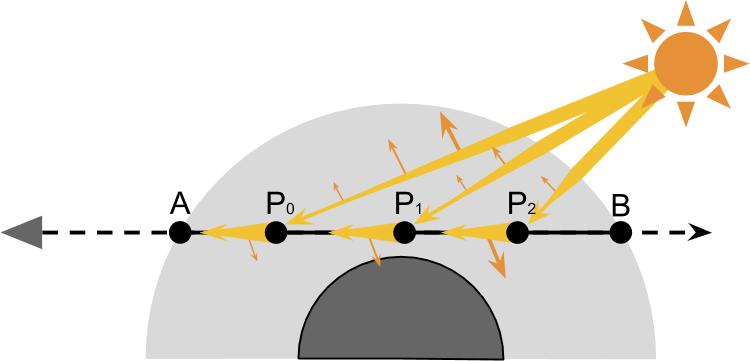
则最终进入到A处的光照为
Implementation
RayMarching
这里借鉴英伟达Demo,利用vs来生成一个全屏的三角形,以方便在PS中RayMarching(因为在VS中无需任何输入)。 此处由于使用了真实的物理数值,因此在Shader实现中需要注意float会溢出的问题,可以通过暂存为double或做单位转换来解决
具体实现可参考Sophia渲染器中shader/skyRayCasting/部分
// vs
struct output{ // something
};
output main(uint id : SV_VertexID)
{
output o;
o.texCoord = float2((id << 1) & 2, id & 2);
o.position = float4(o.texCoord * float2(2, -2) + float2(-1, 1), 0, 1);
return o;
}
// ps
// do some ray march stuff
Mesh Based
这一部分其基本原理与上述是一致的,主要参考于GPU Gems 2。 不同之处在于,Sean O’Neil提出了一个将大气预计算到LUT的方式,具体实现可以参考Sophia渲染器中shader/sky/部分
共计四张纹理,其中光学深度为HDR(部分会超过1)。 密度LUT中x表示海拔(映射为(0, 1))高度,y表示垂直角度(0时笔直朝上,1垂直向下)。 RGBA中Rayleigh与Mie各占一半,Rayleigh部分的密度以及Depth如下图
实现可以参考test中的earth的MakeOpticalDepthBuffer函数
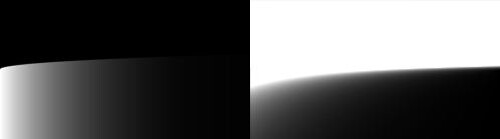
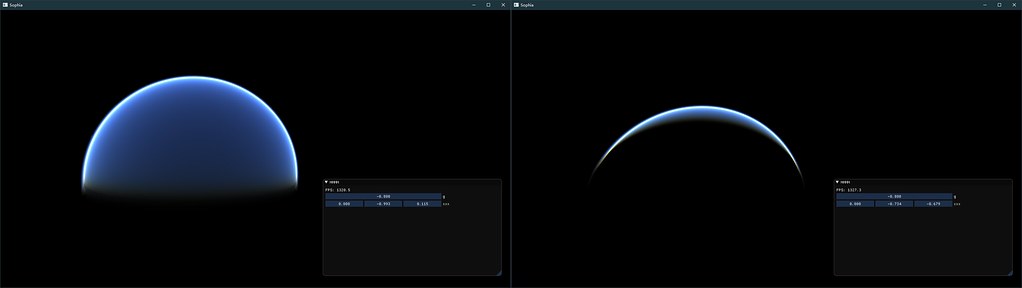
Result
RayMarching结果较好,无论是在太空中或者是球内都有较为不错的结果
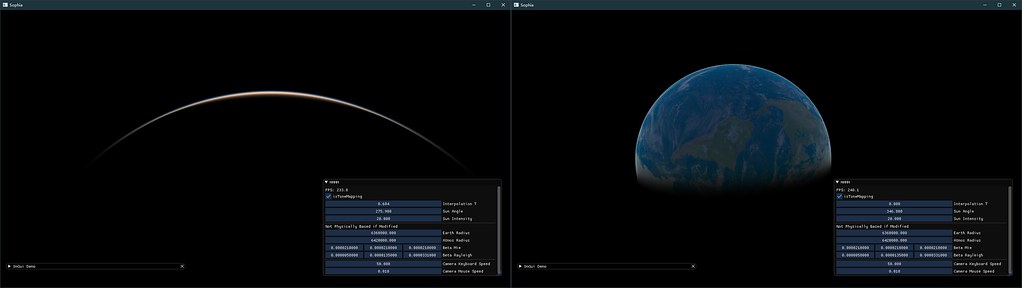

Mesh Based远观效果是可以的,这里的球生成的时候只有64*64的细分程度,再配合上LUT,帧率能跑到1000+fps。 但其缺点是不可近看,在低面数下插值涂抹感比较严重,除非将球的面数成倍的增加,这样就带来了带宽和计算压力显得不是很必要(这里借鉴GPU Gems没有使用地球大小的参数,因此样式略微不同)
因此最佳的方式应该是,RayMarching+LUT的实现方式(将在未来更新)。 原本做Mesh Based是希望能够将地面一次性也做displacement,不过由于效果一般,因此也没有做球内视角。
Reference
- GPU Gems 2: Accurate Atmospheric Scattering:基于Mesh的大气渲染模拟实现参考
- Simulating the Colors of the Sky:基本大气渲染理论推导参考
- Natural Earth III:地球纹理
- Practical Implementation of Light Scattering Effects Using Epipolar Sampling and 1D Min/Max Binary Trees
- Volumetric Atmospheric Scattering:大气理论推导及Shader实现参考
- Flexible Physical Accurate Atmosphere Scattering:预计算LUT对照参考
- 基于物理的大气渲染
- Display of the Earth Taking into Account Atmospheric Scattering
- Rendering Parametrizable Planetary Atmospheres with Multiple Scattering in Real-Time:93年 Nishita关于大气渲染的推导
- Vertex Shader Tricks:VS生成全屏Quad做单像素PS的解释
Introduction
本文建立在CodingLabs以及LearnOpenGL中介绍的基本PBR概念上。
PBR自身概念不陌生,使用满足基于物理的BRDF,满足能量守恒即可。IBL的效果能大大提高观感。 这里选用Cook-Torrance BRDF
漫反射部分可选用Lambertian或Oren Nyar BRDF
Cook-Torrance的高光部分如下,公式具体含义可见
Normal Distribution Function, Geometry, Fresnel三部分各自选用Trowbridge-Reitz GGX,Schlick-GGX, Fresnel-Schlick approximation(离线也常用Schlick的近似菲涅尔来代替繁重计算)
Cook-Torrance的DFG部分有很多实现,GGX拖尾效果较好,其他部分可参考
其中法线分布中的表示表面粗糙度。 几何项中的k根据direct lighting与IBL选用不同粗糙度映射方式。 最后使用光照与视线方向的G相乘
菲涅尔反射计算中的可以根据下表查找所得
| Material | F0(Linear) | F0(sRGB) |
|---|---|---|
| Water | (0.02, 0.02, 0.02) | (0.15, 0.15, 0.15) |
| Plastic / Glass (Low) | (0.03, 0.03, 0.03) | (0.21, 0.21, 0.21) |
| Plastic High | (0.05, 0.05, 0.05) | (0.24, 0.24, 0.24) |
| Glass (high) / Ruby | (0.08, 0.08, 0.08) | (0.31, 0.31, 0.31) |
| Diamond | (0.17, 0.17, 0.17) | (0.45, 0.45, 0.45) |
| Iron | (0.56, 0.57, 0.58) | (0.77, 0.78, 0.78) |
| Copper | (0.95, 0.64, 0.54) | (0.98, 0.82, 0.76) |
| Gold | (1.00, 0.71, 0.29) | (1.00, 0.86, 0.57) |
| Aluminium | (0.91, 0.92, 0.92) | (0.96, 0.96, 0.97) |
| Silver | (0.95, 0.93, 0.88) | (0.98, 0.97, 0.95) |
最后渲染方程(由菲涅尔给出)
Precomputed LUT
贴图选用HDR图像文件,免费HDR文件可从sIBL archive下载

将上述渲染方程左右拆开各做预计算,其中左边为漫反射部分
转立体角为球坐标系下
这里使用Monte Carlo Estimator将二重积分转为离散采样(),这里采用Uniform Sampling(可更换为MIS方法更快收敛)
此处LearnOpenGL对于黎曼和的推导有误,可参考CodingLabs中最后的推导过程. LearnOpengl使用GPU进行预计算,这里我采用CPU端保存为HDR文件以方便Debug,实现部分基本知识公式的翻译(可查看Sophia中的precomputedMap.h查看)
for(int i = 0; i < width; i++) {
for (int j = 0; j < height; j++) {
float phiT = 2PI * i / width;
float thetaT = PI * j / height;
// avoid situations when up = normal
vec3 up(sin(thetaT) * cos(phiT), cos(thetaT), sin(thetaT) * sin(phiT));
vec3 right = up.crosse(normal);
vec3 normal = right.crosse(up);
vec3 irradiance = 0;
// diffuse irradiance compute hemisphere
for (float phi = 0; phi < 2PI; phi += 2PI / samples) {
for (float theta = 0; theta < PI_DIV2; theta += PI_DIV2 / samples) {
local = vec3(sin(theta) * cos(phi), cos(theta), sin(theta) * sin(phi));
world = local.x * right + local.y * up + local.z * N;
x = SphericalPhi(world) / 2PI * width,
y = SphericalTheta(world) / PI * height;
irradiance += GetColor(x, y) * cos(theta) * sin(theta);
}
}
SetColor(i, j, PI * irradiance / (samples * samples));
}
}
右边高光部分也可以拆分为两部分,其中BRDF与IBL在某一分布下做预计算
由于微表面的法线分布选用GGX,因此Importance Sampling的策略与PBRT中建议的一致,都是选择在法线分布上进行重要性采样。 积分拆为数值积分
具体公式详解可以参考UE4的PBR报告
很多地方都没有提到这一点,GGX的法线分布pdf在PBRT上有过推导
因此代入IS下的pdf后,整体就变得更为简洁
首先是左半边的Pre-filtering HDR environment map部分。 这里也就是UE4中所说的近似带来误差最大的部分(由于预计算,无法得知R具体为多少),也就是默认V=R=N,即垂直望去反射光线,法线,视线共线。 根据UE4中的展示,其误差效果仍然能够接受
代码实现部分基本上都是公式的直接翻译
for (int i = 0; i < width; i++){
for (int j = 0; j < height; j++){
float phi = 2PI * i / width;
float theta = PI * j / height;
vec3 N(sin(theta) * cos(phi), cos(theta), sin(theta) * sin(phi));
vec3 V = N = R;
float sumWeight = 0;
vec3 prefilteredColor = 0;
for (int s = 0; s < sampleCount; s++) {
random = hammersley(s, sampleCount);
H = importanceSampleGGX(random, N, roughness);
L = (2.0 * V.dot(H) * H - V).getNormalized();
cosL = max(N.dot(L), 0.0f);
if (cosL > 0.0) {
x = SphericalPhi(L) / 2PI * width;
y = s3SphericalTheta(L) / PI * height;
// The cos here is because UE4 said
// "As shown in the code below, we have found weighting by coslk achieves better results"
prefilteredColor += GetColor(x, y) * cosL;
sumWeight += cosL;
}
}
SetColor(i, j, prefilteredColor / sumWeight);
}
}
Write(fileName);
这里使用CPU计算会有一个高亮点的问题,如若采样数不够(Sophia采用OpenMP进行多核计算,即便如此,20000的采样数也需要花费几小时才能完成),如图是一个高光与周围亮度值差距较大的一张HDR纹理,下图即便是采用了30000的采样数也没能解决,可见一味的提升采样数并不能完全的解决问题。
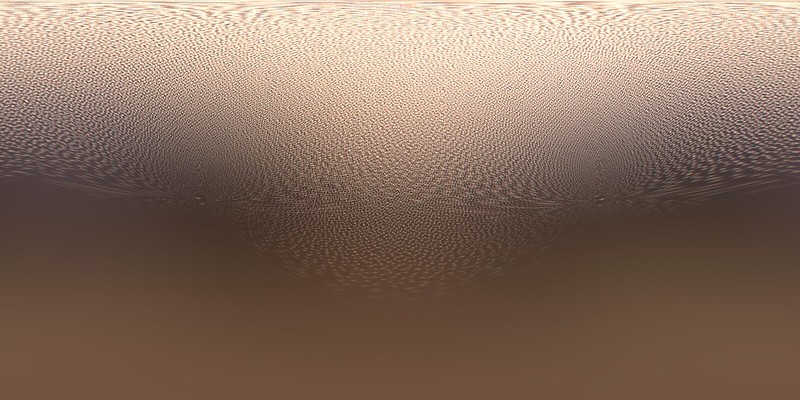
这里LearnOpenGL在计算prefilteredColor时,不直接从原图上采样,而是选用mipmap进行处理,由于我使用了CPU端计算,且自行实现mipmap间插值较为繁琐,因此选用了采样数较大的没有出现bright bots效果的作为替代。 具体实现可参考LearnOpenGL
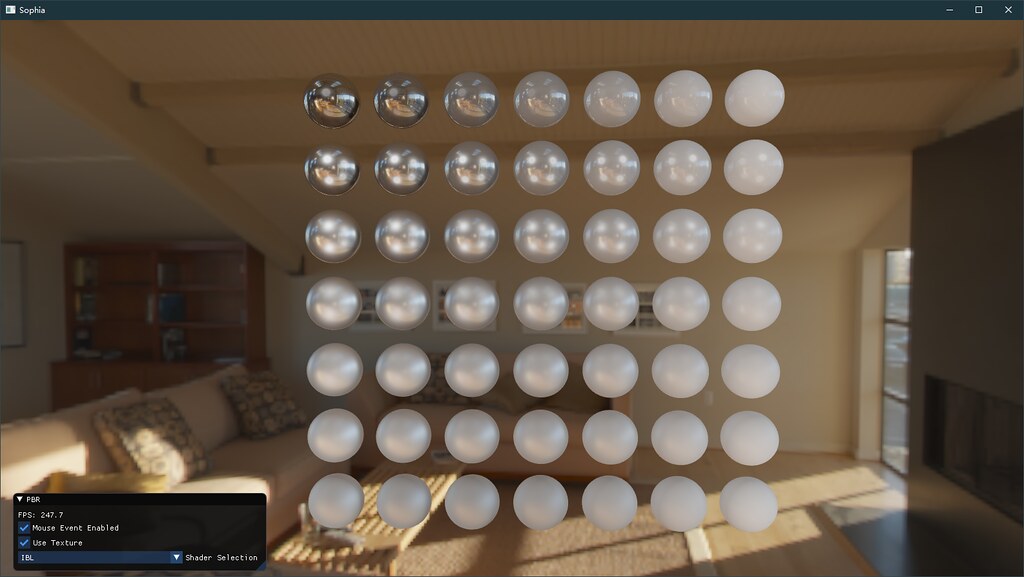
最后将不同Roughness的结果存到不同mimap level上即可,下图为几张不同粗糙度时的结果。

剩下的右半边BRDF部分,做一定预处理
vec3 integrateBRDF(float NoV, float roughness, int samples) {
// V on XoY plane
vec3 V(sqrt(1.0f - NoV * NoV), NoV, 0.0f);
vec3 N = 0;
float A = 0.0f, B = 0.0f;
for (int i = 0; i < samples; ++i) {
vec2 random = hammersley(i, samples);
vec3 H = importanceSampleGGX(random, N, roughness);
vec3 L = (2.0 * V.dot(H) * H - V).getNormalized();
float NoL = max(L.y, 0.0f);
float NoH = max(H.y, 0.0f);
float VoH = max(V.dot(H), 0.0f);
if (NoL > 0.0f) {
float G = geometrySmith(N, V, L, roughness);
float GVisibility = (G * VoH) / (NoV * NoH);
float Fc = pow(1.0f - VoH, 5.0f);
A += (1.0f - Fc) * GVisibility;
B += Fc * GVisibility;
}
}
return vec3(A, B, 0.0f) / samples;
}
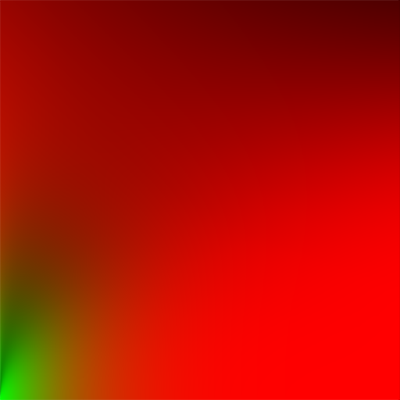
BRDF预计算结果如下图,横纵坐标分别为与Roughness
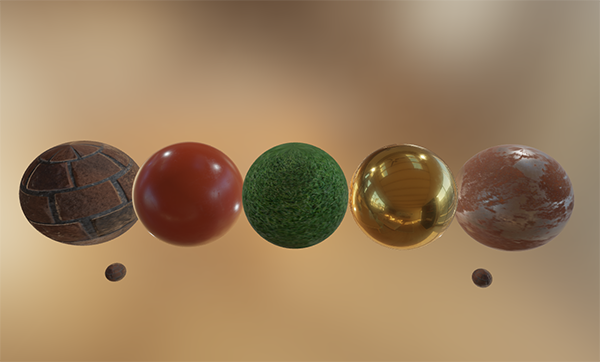
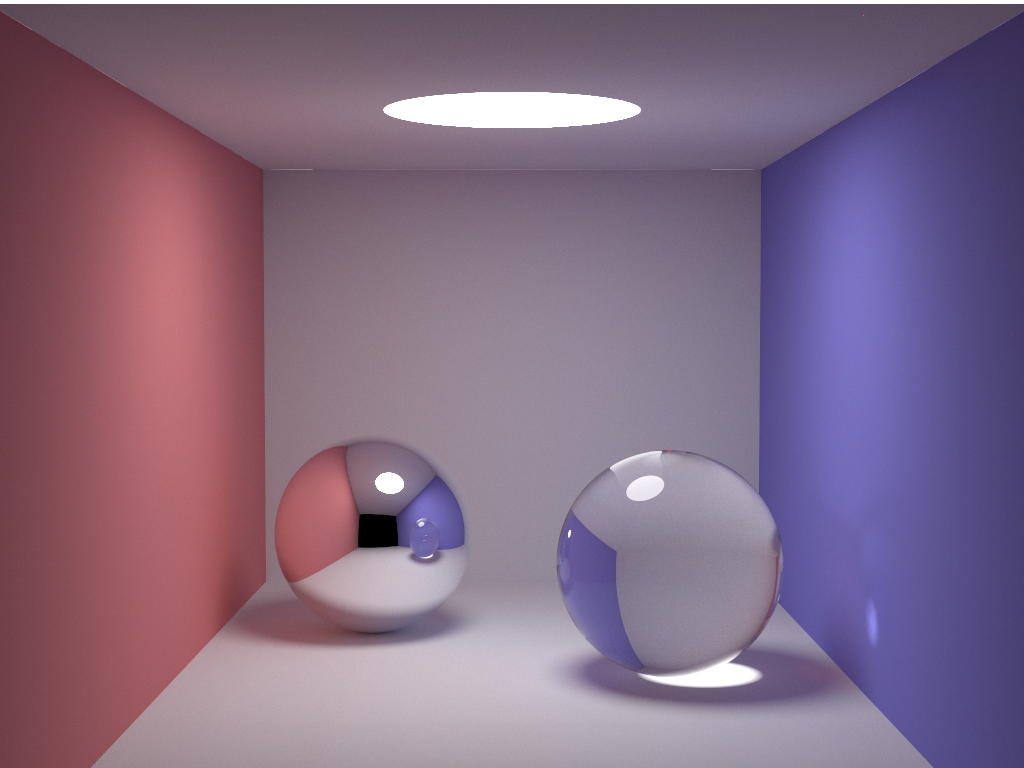
Result
最后结果也较为可观,尽管没有indirectLighting部分,但总体效果已经很不错了。

Reference
- PBRT:基于物理的BRDF及其Importance Sampling理论推导
- LearnOpenGL:基本PBR概念及其实现
- Physically Based Shading during Black Ops
- Klayge:Cook-Torrance BRDF的Importance Sampling PDF推导
- Specular BRDF Reference
- Image-Based Lighting
- Cook-Torrance BRDF
- Physically Based Rendering - Cook–Torrance
- Real Shading in Unreal Engine 4:实时PBR实现理论推导及其近似解的解释
MVP矩阵推导
其中Model, View的矩阵部分可根据Local转World坐标系转换得到,可参考龙书5.6.1章节。
透视投影矩阵可以分为的投影变换,以及的透视校正
首先部分可以根据透视变换的相似三角形推导出,此处部分的FOV令为,横纵坐标比aspect令为。
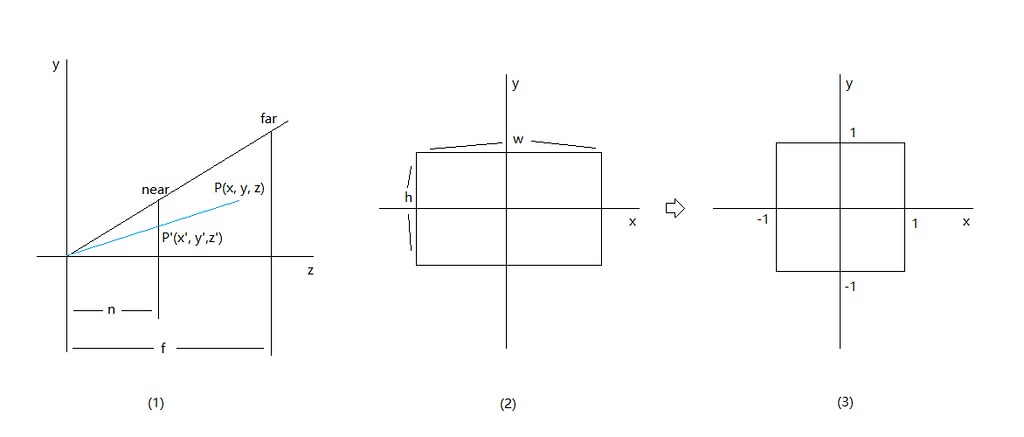
对应的转换细节推导可参考透视投影详解
其中中的已经归一化转化到了NDC空间(注意要用)
此时没有做过变换,本质上若需要归一化,也只需要做一个从区间到的一个变换即可。但若仅仅只是做了一个区间映射而没有经过透视校正,则会出现下述问题。
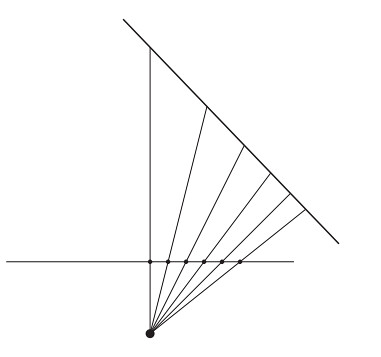
Vertex Shader完成顶点变换后需要做光栅化步骤,此时会在投影平面上进行均匀采样。根据上图中,对屏幕上线段进行均匀采样,而其对应线段中的点并非均匀排布。观察发现对应线段上点的部分仍然保持均匀分布,但由于透视变换的问题造成结果的畸变。
后续的纹理,颜色插值计算也会因为轴的透视问题带来非均匀分布的问题
本质上的问题是因为在透视变换后,是非线性分布的。因此对应的解决方案就是找到一个能够满足深度前后关系不变,且能支持线性插值的量来代替原有的。
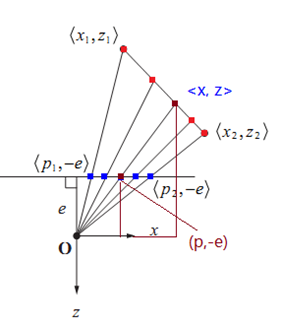
此处证明是线性分布的。令直线为,给出线段上一点,其对应投影平面上的点为,即有
设线段的头尾点为以及对应投影平面上的点为。令由线性插值得出,求对应的线段上的点。
可见在直线上可以线性插值。由于轴在光栅化中需要被插值,因此直接构造使得硬件在做插值时保持线性,为了将归一化到需要构造。已知
求解方程组,则有
可得最终透视投影矩阵
这里推导的结果为左手系。若左右手系区分则只需要调换部分元素位置,可见龙书推导。
Sophia Renderer上的矩阵
由于DirectX 11的GPU部分采用了列主的矩阵排布。一般有两种解决方案
- CPU端采用行主,GPU端采用列主,在CPU绑定矩阵到CB的时候转置一次。
- CPU端采用行主不变,GPU端直接左乘向量(GPU上的矩阵是CPU的转置)
采用两种方式不同的地方在于,前者,后者本质上是,而由于列主是默认的,因此在GPU上看起来就像一样。本质上只是CPU端的转置结果。
这里Sophia Renderer采用第二种方式,即默认GPU端都为CPU端绑定结果的转置,因此选用左乘来得到正确结果。
Reference
- Mathematics for 3D Game Programming and Computer Graphics, Third Edition, Section 5.4
- Introduction to 3D GAME PROGRAMMING WITH DIRECTX® 11, Section 5.6
选择smallpt了作为Cuda Path Tracer初尝的借鉴,因此此次主要任务是对smallpt进行Cuda移植,并与好友shawnlu尝试性的做了部分GPU上的优化。代码已开源至smallptCuda
Cuda部分的入门教程较多,可以参考CUDA C/C++ Basics以及An Even Easier Introduction to CUDA
Benchmark
| Config | GTX1080Ti | Intel Xeon E5 (6C12T) 2.80GHz |
|---|---|---|
| Resolution | 1024*768 | 1024*768 |
| SPP | 5000 | 5000 |
| Cost Time | 4.3s | 32min |
| Config | GTX750 | Intel Xeon E5 (8C16T) 2.40GHz |
|---|---|---|
| Resolution | 768*768 | 768*768 |
| SPP | 2048 | 2048 |
| Cost Time | 19.0s | 7.2min |
Cuda部分杂记
Cuda在Windows上会遇到Kernel执行时间过长而被结束进程的问题,可以参考Note中对核函数的监控项进行修改的操作。
本例使用的
helper_math.h可以在Custom Cuda Dir\CUDA Samples\v8.0\common\inc
中找到,Cuda提供了基本的float3, int3之类的包装便于计算。
从OpenMp到Cuda
Cuda的部分难度主要是对于Grid, Block, Thread的理解上, 对于GPU与Cuda的抽象逻辑对应上可以参考Cuda的Threading: Block和Grid的设定与Warp。
总结一下,Warp是组成线程组的基本单位,一般为32,不足32的会以32个线程打包运行(有部分线程不工作,造成浪费),一般而言BlockSize设定为256总体效果都还不错。SM会根据分配的Block消耗资源的多少来分配究竟有多少个Block在SM中。
具体的N卡核心数等属性信息,可自行获取
cudaDeviceProp打印。具体属性值含义可参考cudaDeviceProp Struct Reference
和OpenMp这类CPU上的多核并行不同的是,在线程中并不确定执行顺序,因此需要知晓当前线程对应像素关系就需要threadIdx, blockIdx, blockDim, gridDim等变量来算出。这部分在CUDA C/C++ Basics有简介。
失败的优化
在参考Yining Karl Li的报告后,曾尝试转变原有的基于像素的并行转为基于光线的并行,核心思想就是通过预分配光线,将光线的深度iteration拆分为广度每循环一次加深一层并做stream compaction减少光线数量。
可查看dev分支的历史commit查看具体实现
这里遇到了两个问题
- 未预估到光线的占用内存情况,按照下方的Ray布局一根光线将会占用60B, 取SPP为2048为例每个像素将预分配SPP根光线,需要的显存。
struct Ray
{
float3 origin;
float3 direction;
int depth, pixelIndex;
float3 throughput, L;
};
即便是最简形式的Ray,也仍然占用12B,上述分辨率下也需要占用9G显存,GTX750上的2G显存远远不够(好友的GTX1080ti 12G显存面对45G这样的压力也完全不够)。
struct Ray
{
float3 origin, direction;
};
2.Cuda中Thrust的Stream Compaction本身并行效率很可观(优化原理可参考Yining Karl Li的报告),但此法其实更适合于实时光线跟踪,对于目前的GPU纯计算而言,不仅仅增加了Device与Host之间的带宽开销,增加了多次Kernel启动消耗,更增加了线程需要从Global Memory多次读写数据的开销(且存在线程竞争情况)。甚至降低的光线数量带来的性能优化完全不足以弥补。
// cast all rays we need
initRays<<<A, B>>>();
// Russian Roulette would stop ray
while(1)
{
rayStep<<<C, D>>>();
// reduce the count of ray
streamCompaction();
}
最后dev版本放弃了Stream Compaction,改用如下方式,但初始化分配光线仍然需要巨大资源消耗,且在ray结束迭代需要将结果存入放在Global Memory上的output缓冲区时,需要做原子操作以免出现竞争问题(进一步带来了消耗)。
// cast all rays we need
initRays<<<A, B>>>();
// Russian Roulette would stop ray
rayIterate<<<C, D>>>();
由于相比于基于像素并行带来的额外内存开销,整体性能倒退2x左右。原本只是希望展开GPU线程中忙忙的for(spp)繁重的循环已达到性能优化,但基于光线的并行的确更适合实时光线追踪而非纯GPU渲染。
内存上的优化
并行效率难以优化的前提下,内存优化是突破口。由于GPU的Cache过小,不会做类似CPU上的多级Cache块调入优化,Global Memory类似于CPU上的内存,Shared Memory便可充当Register或Cache的地位(Shared的速度最优情况下接近寄存器),Global与Shared区别可参考Stackoverflow。
这里做的本质上就是手工模拟Cache与内存块交换思想。以如下输出结果至缓冲为例,
__shared__ float3 temp;
temp = // do some assignment;
// output on global memory
output[i] = temp;
先将结果存入shared上的temp,再转入global上的output,思想类似于多级cache(其余sheard部分优化类似)。还对基本的类型做了内存对齐。但由于光线跟踪带宽要求并不高,所以最后结果优化并不明显,不过仍然有1s左右的提升。
| GTX750 | Before | After |
|---|---|---|
| Resolution | 768*768 | 768*768 |
| SPP | 2048 | 2048 |
| Cost Time | 20.517145s | 19.000868s |
