坐标变换
通常摄像机动画,模型动画中会使用旋转平移变换来完成坐标变换。这里使用基变换来完成通用的坐标系转换。
现要求得世界坐标Pworld对应的代求坐标系Ω下坐标PΩ,已知Ω坐标轴向量分别为X⇀,Y⇀,Z⇀,坐标原点为O
worldToObject⎣⎢⎢⎢⎡X⇀.xX⇀.xX⇀.z0Y⇀.xY⇀.yY⇀.z0Z⇀.xZ⇀.yZ⇀.z0O.xO.yO.z1⎦⎥⎥⎥⎤
即有PΩ=worldToObject∗Pworld.(该矩阵含义可展开其含义自明)
PBRT以及Atmos中关于相机各类坐标系的转换
PBRT中的NDC坐标系在Atmos中未使用,因为其本身在PBRT中并不直接体现
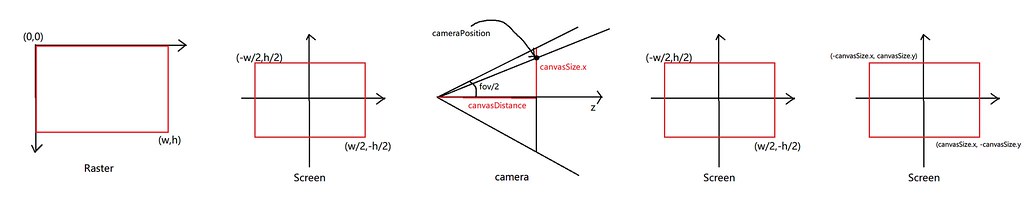
具体的转换管线流程如下,实现公式可由下图各自推导出来,不做赘述。
rasterPosition(imageX, imageY);
// raster to screen
screenPosition(rasterPosition.x - image->width / 2.0f, -rasterPosition.y + image->height / 2.0f);
// screen to camera
// 这里pbrt中使用投影矩阵的逆变换得到cameraPos,不过由于透视的特殊性,其方向向量是一致的。
cameraPosition.x = 2 * canvasSize.x * screenPosition.x / image->width;
cameraPosition.y = 2 * canvasSize.y * screenPosition.y / image->height;
cameraPosition.z = canvasDistance;
// camera to world
ray->direction = (cameraToWorld * cameraPosition).getNormalized();
ray->origin = cameraToWorld * zeroVector3;
之后可以用worldToCamera矩阵进行转换。
worldToCamera⎣⎢⎢⎡right.xright.xright.z0up.xup.yup.z0direction.xdirection.ydirection.z0origin.xorigin.yorigin.z1⎦⎥⎥⎤