CentOS 7
修改SSH默认端口22
SSH远程登录部分可参见SSH原理与运用。具体终端命令可参见怎样修改 CentOS 7 SSH 端口, 本质为修改开放端口+防火墙修改
如若和我一样为阿里云服务器, 则需要找到控制台中的安全组规则,自定义的开放想要SSH连接的端口,否则在Xshell等工具中仍然无法连接。

关闭账号密码登录
vi /etc/ssh/sshd_config
找到PasswordAuthentication yes,更改为no即可。此时再用一未信任的设备连接,可用终端命令登陆
ssh -p 22 hostName@address
提示以下错误信息则证明已无法直接通过账号密码直接登陆
Permission denied(publickey,gssapi-keyex,gssapi-with-mic).
Nginx搭建开发
Nginx的环境搭建可见Nginx Documentation,在配置SSH默认端口过程中可能将Nginx使用的默认80端口禁用,可参考Centos 7 firewall 命令在防火墙中打开对80的访问。
以免在服务器上预览开发效率过低,因此在本地也同时配置了Nginx,同时搭配Browsersync可以保证只要Web文件有修改时浏览器自动刷新,提高开发效率。
Nginx默认在80端口开放,因此启用代理模式可以实现类似Hexo主题开发中的效果。
browser-sync start --proxy "localhost:80" --files "**"
引号中的内容可更换为
**.css等glob语法的正则表达式.
Git的自动化部署
Git的环境搭建可参见搭建Git服务器。由于更换了端口号,因此所有Git命令的对象都变为了类似
git clone ssh://host@ip:port/xxx/xxx。
在配置完Nginx后,为了能git push后将整个repo拷贝到Nginx的指定网页文件夹中(默认为Nginx/html), 可参考VPS服务器搭建Hexo博客教程中的安装配置git部分实现Git Hook的功能。
如若为Windows平台,可能遇到push后post-receive文件无法自动执行的问题,因为行尾Unix与Windows格式不一,可在Sublime或其他文本编辑器中修改行尾为UNIX即可解决(其他无法执行原因可直接执行该脚本查看)
理解来自CSDN中的递归删除算法,个人补充细节描述
题为「设计递归算法,删除无头结点的单链表L中值为x的结点」
void deleteX(LinkList &L, ElemType x)
{
LNode *p;
if(L==NULL) return;
if(L->data==x)
{
p=L;
L=L->next; // (1)单链表保持连续
free(p);
deleteX(L,x); // (2)递归调用
}
else
deleteX(L->next,x); //(3)向后遍历
}
理解难度在于似乎仅仅只是释放了当前结点并使得L向前推进,而导致了断链。
例如要在单链表中删除元素(例如),这里递归第二次调用函数讲会遇到
核心理解在于这里的LinkList L是引用, 观察堆栈会非常清晰的说明这个问题。
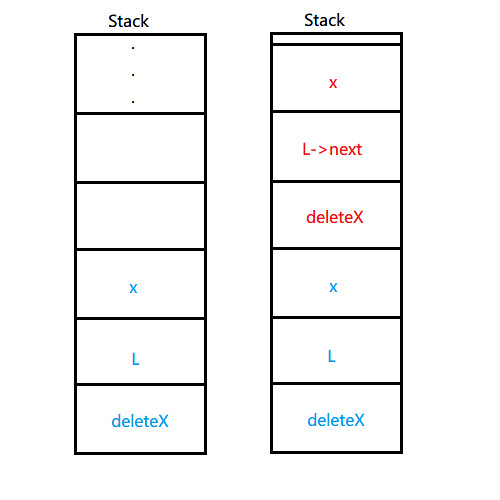
当代码中处递归调用deleteX时, 参数作为L->next的引用传入(引用为别名,相当于本体操作),即递归中参数L为上一函数的L->next本体,此时的代码相当于
deleteX(L->next, x)
{
// ...
p = L->next;
L->next = L->next->next; // 单链表保持连续
free(p);
deleteX(L->next, x);
// ...
}
如若将引用更换为指针,相较于引用的实现较为繁琐,但更能观察到上述代码工作的本质。
// 仅有传入指针的指针才能改变上一函数中指针的值
void deleteX(LinkList **L, ElemType x)
{
LNode *p;
if((*L)==NULL) return;
if((*L)->data==x) // L->next指向的结点为x
{
p=*L; // p指向L->next指向的结点
*L=(*L)->next; // L->next=L->next->next
free(p);
deleteX(L,x); // 传入L->next的地址
}
else
deleteX(&((*L)->next),x); // 传入L->next指向的结点的next指针的地址
}
坐标变换
通常摄像机动画,模型动画中会使用旋转平移变换来完成坐标变换。这里使用基变换来完成通用的坐标系转换。
现要求得世界坐标对应的代求坐标系下坐标,已知坐标轴向量分别为,坐标原点为
即有.(该矩阵含义可展开其含义自明)
PBRT以及Atmos中关于相机各类坐标系的转换
PBRT中的NDC坐标系在Atmos中未使用,因为其本身在PBRT中并不直接体现
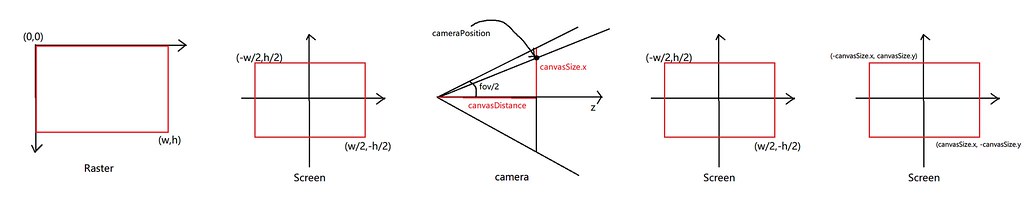
具体的转换管线流程如下,实现公式可由下图各自推导出来,不做赘述。
rasterPosition(imageX, imageY);
// raster to screen
screenPosition(rasterPosition.x - image->width / 2.0f, -rasterPosition.y + image->height / 2.0f);
// screen to camera
// 这里pbrt中使用投影矩阵的逆变换得到cameraPos,不过由于透视的特殊性,其方向向量是一致的。
cameraPosition.x = 2 * canvasSize.x * screenPosition.x / image->width;
cameraPosition.y = 2 * canvasSize.y * screenPosition.y / image->height;
cameraPosition.z = canvasDistance;
// camera to world
ray->direction = (cameraToWorld * cameraPosition).getNormalized();
ray->origin = cameraToWorld * zeroVector3;
之后可以用worldToCamera矩阵进行转换。
本文运用上文中多维随机变量分布转换规律,来推导出PBRT中一系列重要结论
极坐标与笛卡尔坐标
已知,其中
则有
球坐标与笛卡尔坐标
则,其中
则有。
立体角与球坐标
立体角的定义为在单位圆上投影的面积,在球坐标中有成立
因此基于物理Lambertion中的=1, 可得
若定义在某区域上的概率为,也有
因此
半球上立体角均匀采样
要对单位半球做关于立体角的均匀采样,则,根据上文中与球坐标关系,。
则有两独立同均匀分布随机变量,要转换成满足半球上均匀分布的球坐标表示。
这里很明显可以看出来为两个独立随机变量
应用反CDF变换法则,,因此
由于球坐标不容易在计算机中表示,因此转换为笛卡尔表示
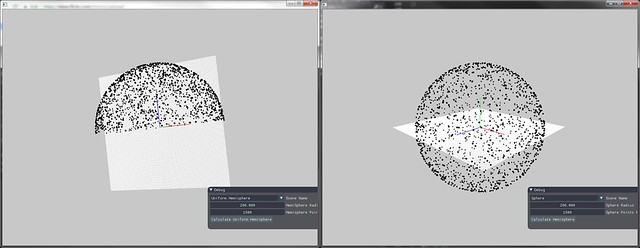
同理可推证球上立体角均匀采样
下图为半球上均匀采样的结果与完整球上均匀采样的结果
单位圆上的均匀采样
要根据面积对单位圆上进行均匀采样,,则。
则他们对于的CDF为,
求出其对应反函数,
若有两满足在上均匀分布的随机变量有
则转换回笛卡尔坐标结果为
这里也是两个独立的随机变量
PBRT中论述的Concentric Disk Sampling可以参见前文Depth of Field中的实现与可视化
基于Cosine函数的半球采样
这里使用基本的转换思路,,因此
有,则有
可得CDF为
应用反CDF得
转换为笛卡尔下的表示为
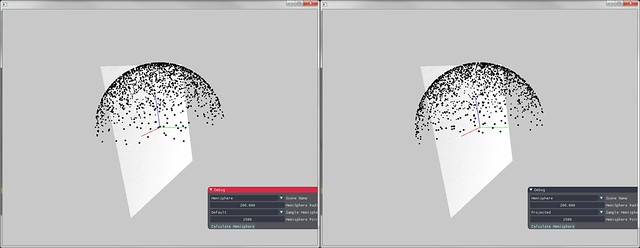
PBRT中给出了另一种计算办法,将均匀分布在圆盘上的点投影到半球上,其结果就满足Cosine-Weighted。
以下给出证明
假定在圆盘上的极坐标分布为(使用方便后续将对应为相关),
即有,和上述中得到的结果一样。
下图为两种方法产生的Cosine-Weighted对比
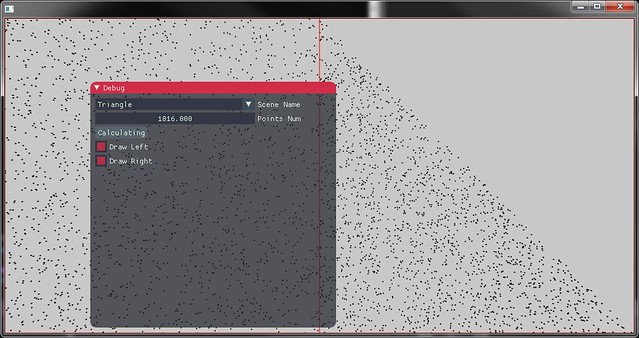
三角形均匀采样
PBRT中采用了等腰切两边为1的三角形特殊情况,不过以下计算办法可以变换回任何三角形
有(面积倒数),则有
这里反变换CDF开根号时要注意到
因此有
下图中即为三角形上的均匀采样
根据二维分段函数分布采样
这里分段函数的采样即为离散随机变量,若有横向纵向各个元素,函数上指定位置一点值为,那么就有
而边缘概率密度可直接得到
之后利用CDF反变换,即PBRT中distribution1d的实现办法可完成对于上的采样
此处效果可见前文中的二维分段函数采样的结果
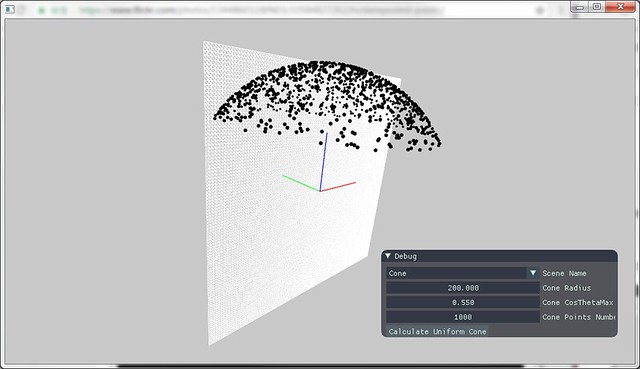
圆锥均匀采样
类似于球上的均匀采样, 易证随机变量相互独立
已知,则
若有两随机变量,运用反变换可有(此处省略了到笛卡尔的转换)
下图中即为圆锥上的均匀采样
关于连续型随机变量的分布转换,除了使用反CDF函数将均匀分布函数转换为其他分布函数以外,存在一种通用办法实现不同分布之间的转换,不只局限于均匀分布。
假定存在随机变量,其累积分布函数为。若存在单调函数,使得(因为是单调函数,因此与的关系为单射),则为了计算的累积分布函数,
设此时为严格单调递增
此时对终式左右对x求导(累积分布函数导数为概率密度函数)
再设此时为严格单调递减
同样的有
则有。
PBRT中讲到,当我们有一概率密度为的随机变量,想要转换为满足已知分布为的随机变量,那么即有下式成立(此过程与上式正好相反)
或当为单调减函数时,PBRT中未对此处进行详细说明。
因此当为满足区间均匀分布的随机变量时,,那么上式中或是都满足区间均匀分布,则,即Inverse Transform Sampling得证。
多维随机变量的转换为双射变换,则满足,且
蒙特卡洛方法求积分以及部分所需的概率论术语可以在PBRT以及概率论与数理统计中找到
PBRT中给出了蒙特卡洛估计量,其中随机变量且独立同分布,分布满足概率密度函数 。
其期望为
方差为
结果的误差与标准差成正比,因此随着样本数增加误差缩小速度仅与相关(即常说的增加4倍采样数目才能缩小一半的误差)
PBRT以及许多其他文章书籍等直接给出了这个估计量的期望计算(其中第二步到第三步并未直接说明来由,尽管PBRT在对期望的简介中已给出式子),这一步只能证明估计量本身无偏*。
以下将给出证明
引用一个知识点: Law of the unconscious statistician,简称LOTUS。用法是已知随机变量X的分布,但并不知道函数g(X)的分布。那么此时函数的期望为
(X为离散型随机变量)
(X为连续型随机变量)
此处细节介绍也可以看Wyman的技术博客,其中就提到了许多地方都没有涉及到的LOTUS。
这里积分区间变为也是如此。以下将会使用到大数定律的知识背景。
引用自维基百科:设 为相互独立的随机变量,其数学期望为: ,方差为:
则序列, 依概率收敛于 (即收敛于此数列的数学期望 )。
取一组独立同分布的随机变量,且在内满足分布律,则令,**则也是一组独立同分布的随机变量。**,那么计算其得到的期望其实就是积分本身(见下)。
由大数定理
那么这里已经有随机变量存在,且期望等于积分值,**那么根据大数定理可知,这里的就是会依概率收敛于积分值。**证毕。
